صفحه اصلی | محصولات | سینا روبوهب(مدل ریست)
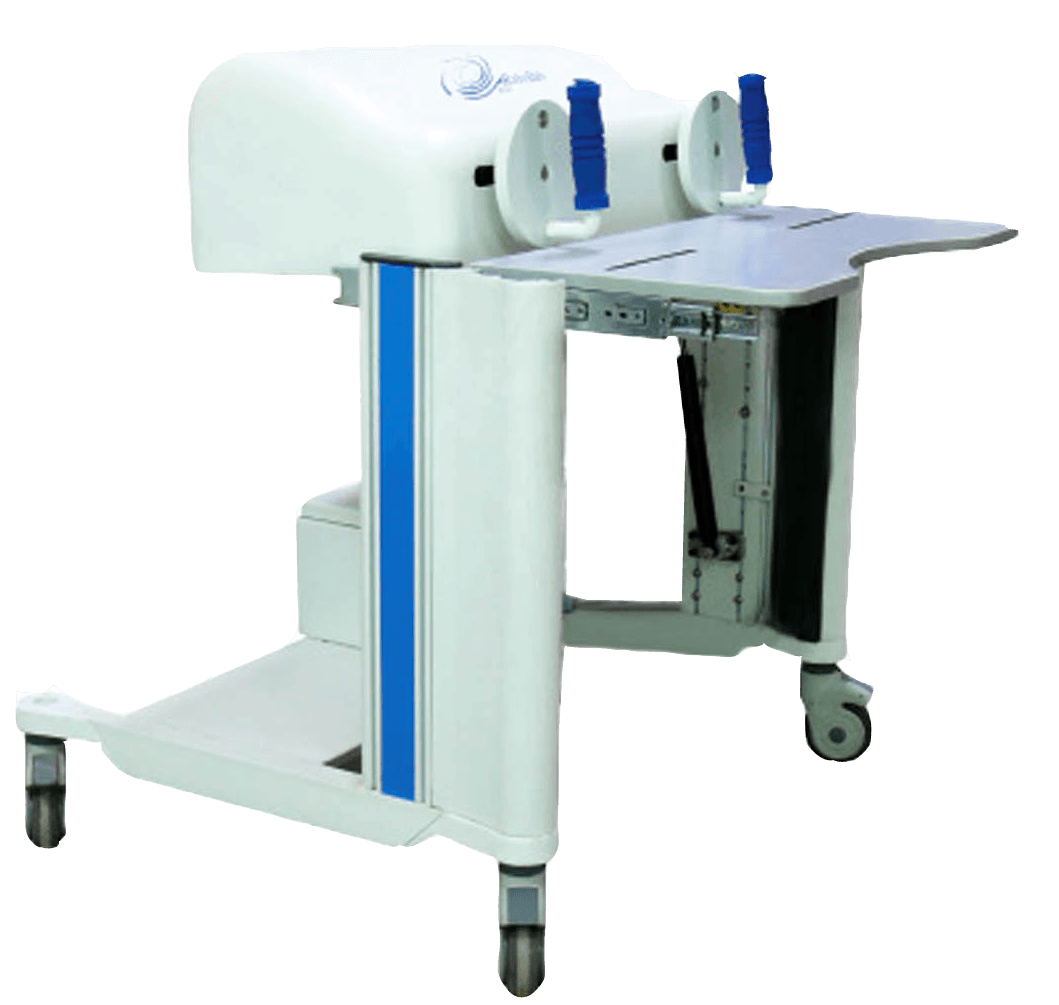
روبوهَب (مدل مچ)، یک وسیله توانبخشی کاملا رباتیک است که برای پروتکل های توانبخشی مچ دست طراحی شده است. با دو محور حرکت فعال ، می توان هرگونه حرکت منفعل / فعال کنترل شده بر روی خم شدن / کشیدن و سوپیناسیون / خارش مچ دست را اجرا کرد. این روش درمانی شامل ۷ دستهی فعال، غيرفعال، فعال فعال، محدود فعال، مقاومتي، پارکینسون و ارتوپدی میباشد و با توجه به درجه بیماری (شدت اسپاستیسیته) و همچنین میزان بهبود بیماری به انتخاب فیزیوتراپ، روش درمانی انتخاب میگردد و ارزیابی های لازم بر روی وضعیت بیمار صورت گیرد. این ارزیابی ها عبارتند از:
از مزایای دستگاه می توان به موارد زیر اشاره کرد: