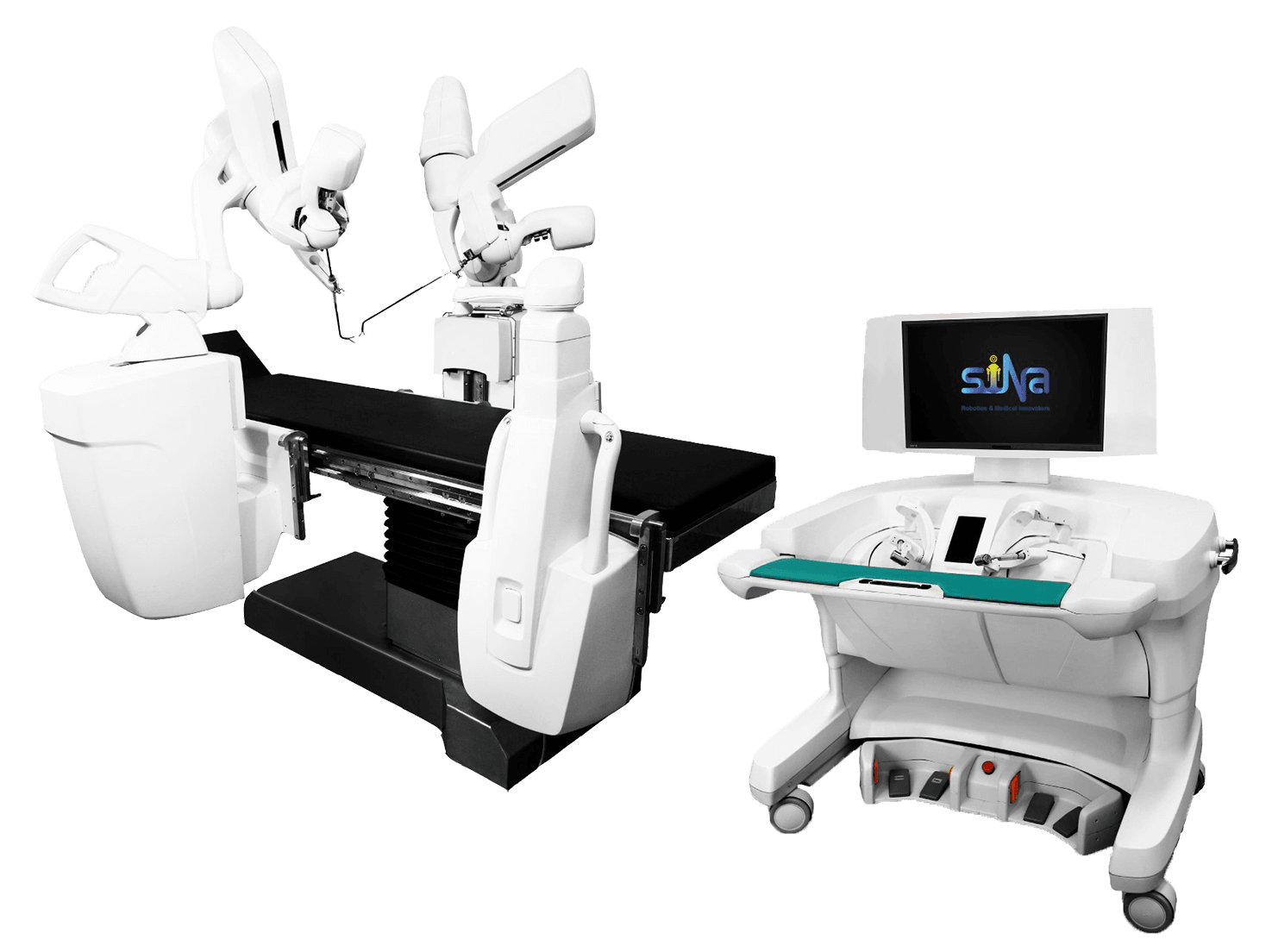
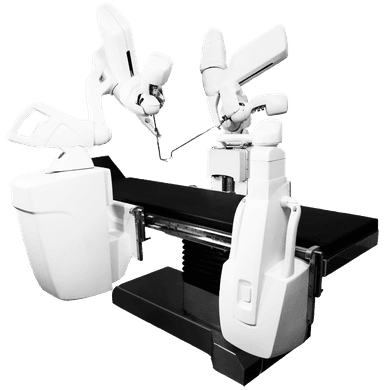
سامانه جراحی رباتیک سینا مدل فِلِکس، یک سامانه جراحی رباتیک از راه دور است که قابلیت انجام عمل های جراحی با حداقل آسیب در حفره شکمی، قفسه سینه و حفره لگنی به روش رباتیک را به ارمغان آورده است. این سامانه از دو بخش اصلی تشکیل شده است:
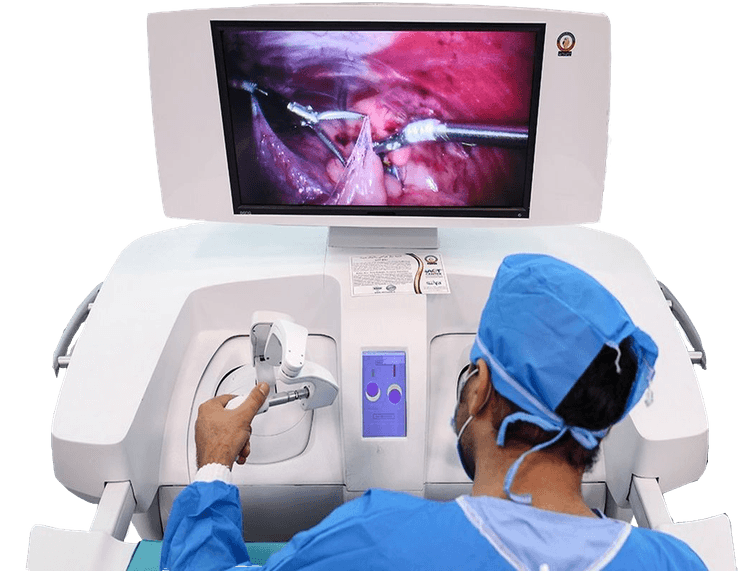
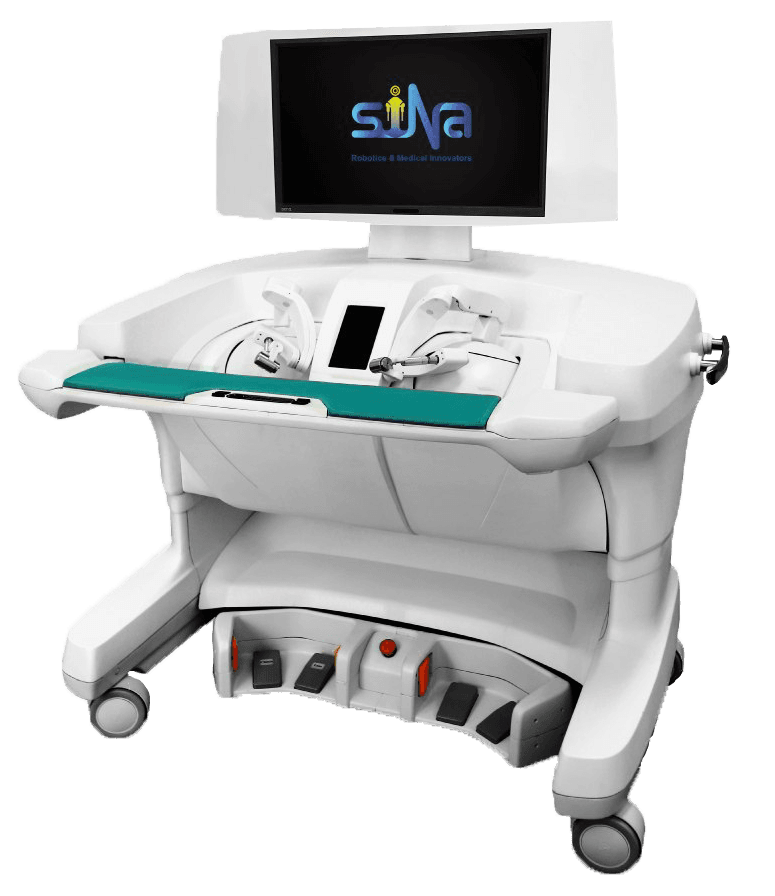
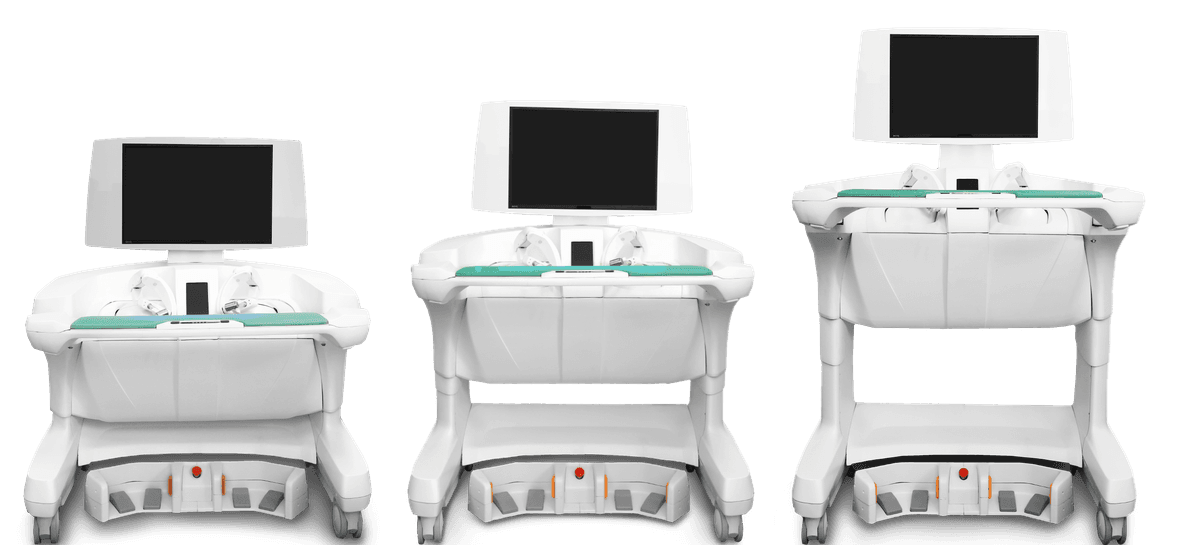
این کنسول که در اختیار جراح قرار دارد؛ تصویری زمان حقیقی از موضع جراحی را در اختیار جراح قرار داده و همزمان فرامین حرکتی دستان جراح، انگشتان و پاهای وی را دریافت و با استفاده از توابع حذف لرزش و مقیاس گذاری به ربات های جراح ارسال می نماید.
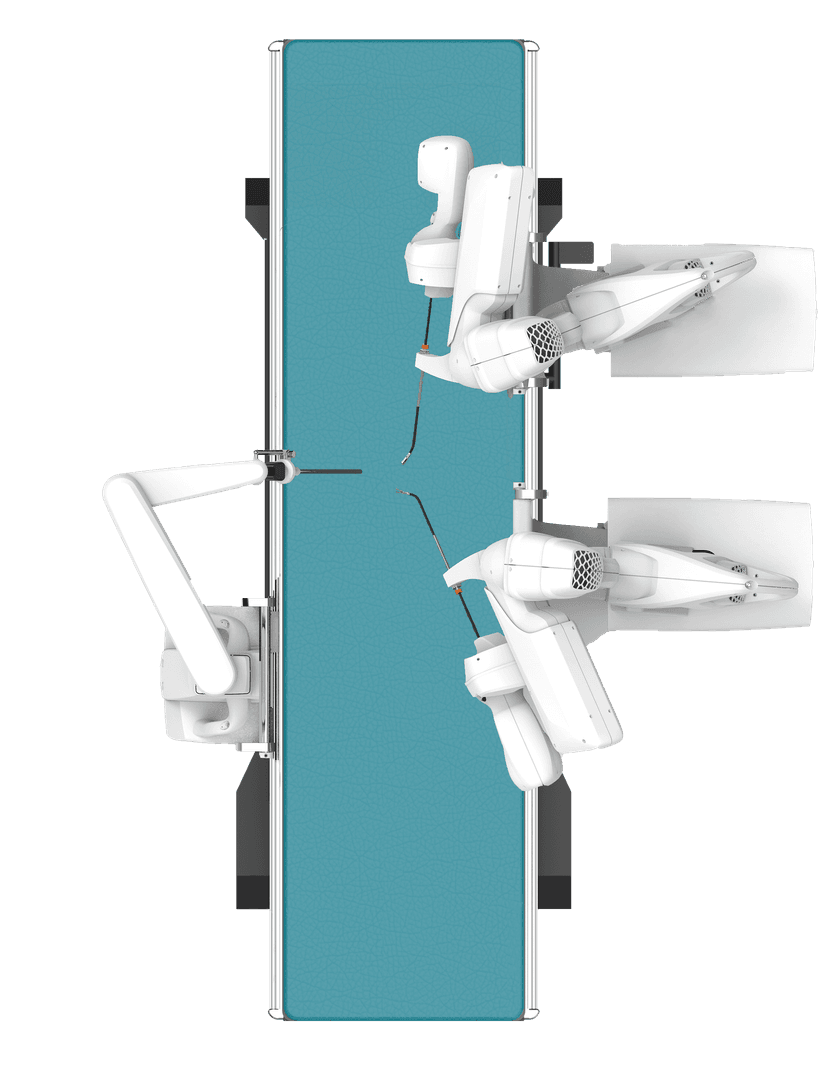
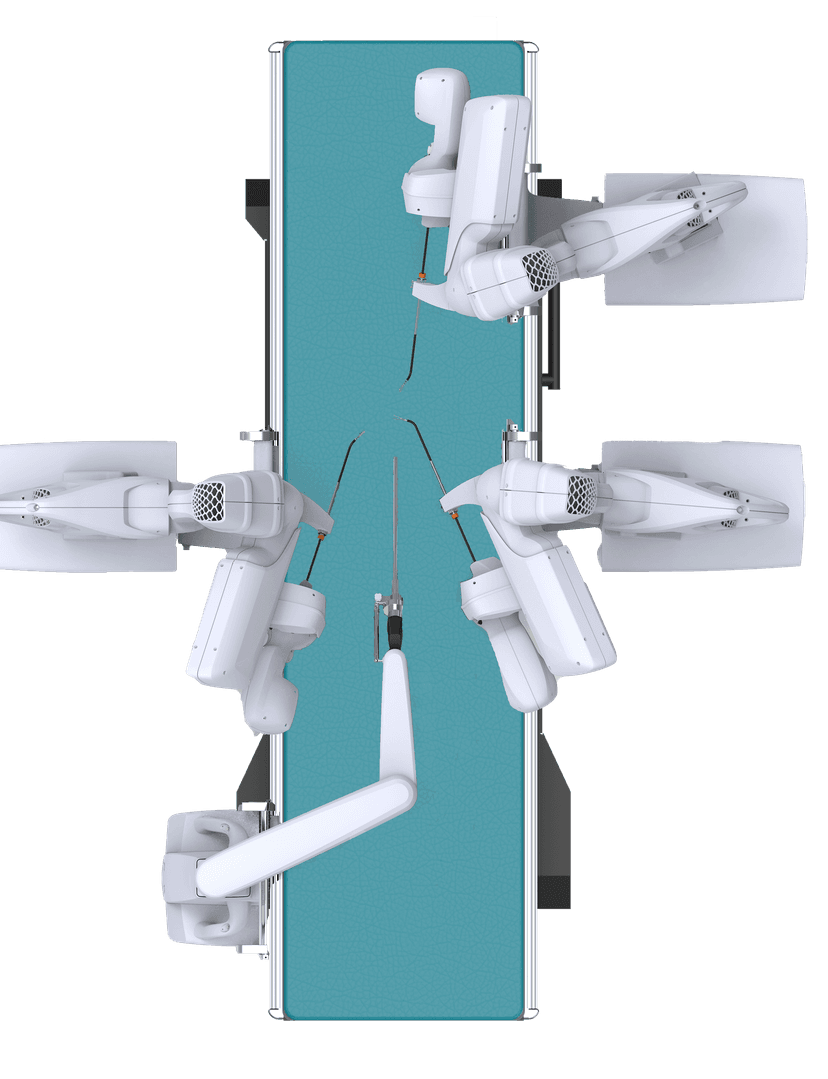
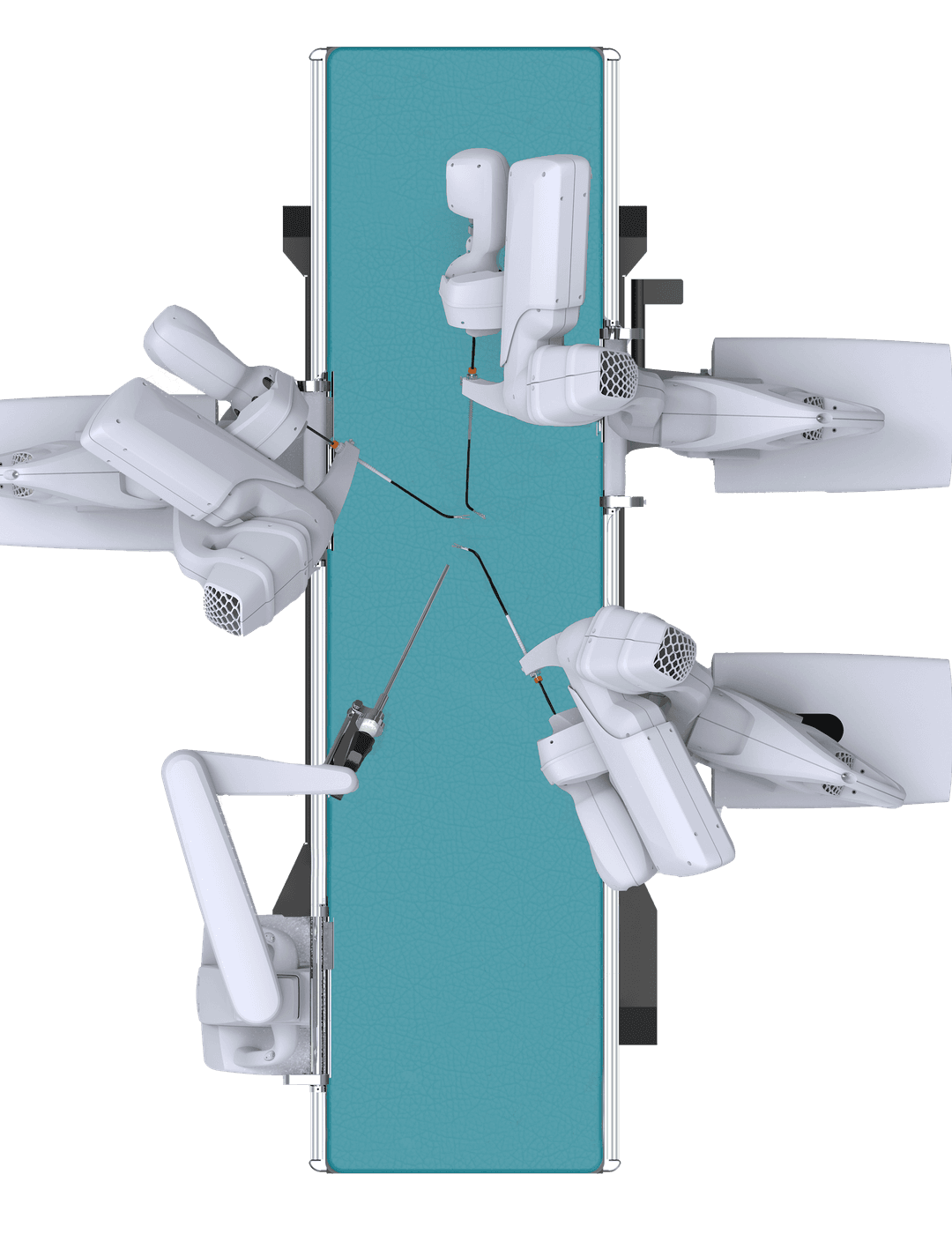
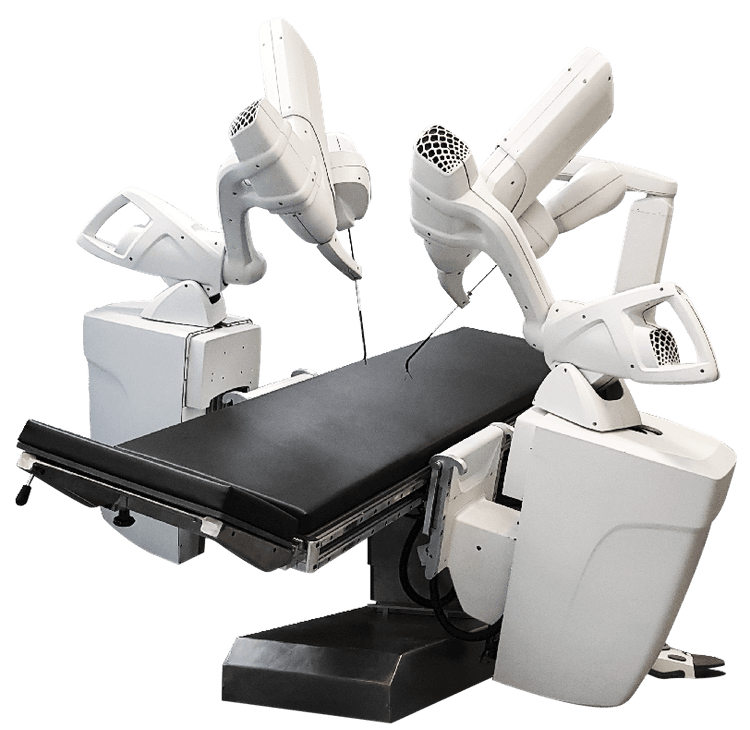
این مجموعه بر بالین بیمار قرار دارد و حرکات دریافت شده از کنسول جراحی را به صورت زمان حقیقی و دقیق روی بدن بیمار و در موضع عمل جراحی اعمال می نماید.
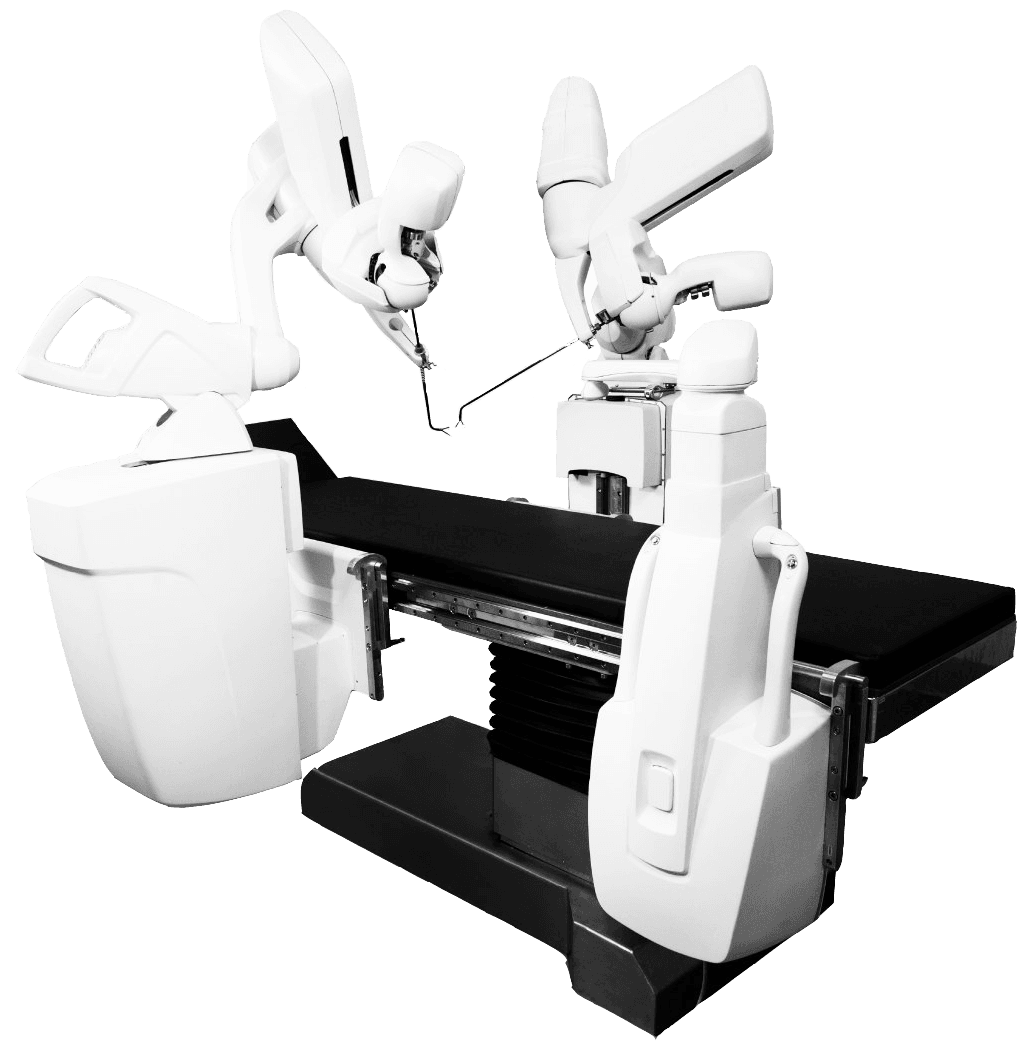
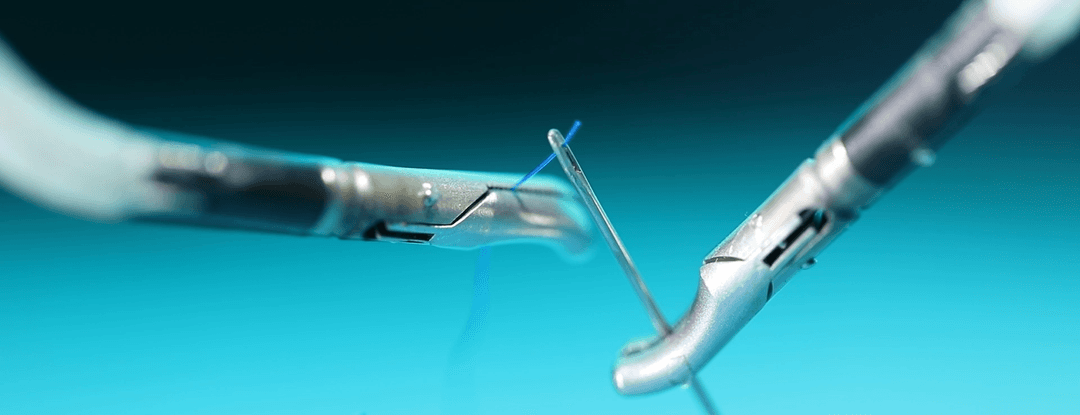
این سامانه قادر است پیچیده ترین جراحی ها در اعماق حفره شکمی را تنها از طریق دو یا سه شکاف پنج میلیمتری و یک شکاف ده میلیمتری انجام دهد. بر خلاف جراحی لاپاروسکوپی، در این روش هیچ محدودیت حرکتی در مچ و انگشتان دست جراح وجود نداشته و حرکت های دستان جراح معکوس نمی باشند. علاوه بر آن، سینا قابلیت خمش ۱۸۰ درجه ی مچ در کلیه ی جهات و چرخش موضعی نامحدود در هر جهت، فراتر از قابلیت های طبیعی دستان جراح را به فرآیند جراحی اضافه می نماید.
۱

ارتباط به صورت محلی | اینترنتی
ارتباط بین دو بخش مذکور به صورت محلی یا از طریق اینترنت از راه دور میسر شده و جراح می تواند عمل جراحی را از شهری به شهر دیگر به انجام رساند، لذا انجام جراحی در مناطق دوردست میسر شده و نیازی به سفر بیمار یا جراح از شهری به شهر دیگر نخواهد بود.
۲
مقیاس گذاری حرکت دستان جراح
در حالت پیش فرض بین حرکات دستان جراح در کنسول جراحی و ابزارهای جراحی رباتیک در شکم بیمار، تناظر یک به یک وجود دارد، اما می توان به منظور افزایش دقت، این مقدار را تغییر داد؛ به این ترتیب با حرکت دست جراح، ابزارها به مقدار کمتری حرکت می کنند و انجام حرکات بسیار ظریف میسر می گردد.
۳
حذف لرزش از حرکات دستان جراح
این سامانه قادر است به صورت خودکار لرزش دستان جراح را تشخیص داده و حرکت ناشی از لرزش را از حرکت اصلی دست جراح جدا کرده و تنها حرکت اصلی را بر روی ابزارها اعمال نماید.
۴
دور کردن جراح از عوامل بیماری زا در اتاق عمل
حتی در صورت استفاده محلی از این سامانه، کنسول جراحی و ربات های جراح می توانند در دو اتاق جدا از هم کار کنند. به این ترتیب جراح در معرض عفونت های بدن بیمار ، تشعشعات یونیزان حین تصویربرداری، گازهای بیهوشی و دی اکسید کربن مورد استفاده در عمل های لاپاروسکوپی قرار نمی گیرد.
۵
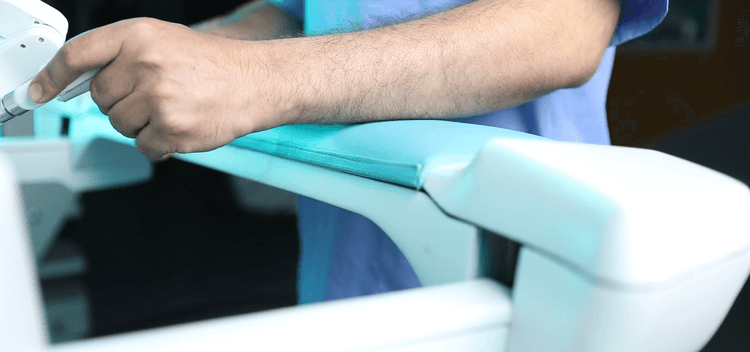
ایجاد شرایط کاری ارگونومیک برای جراح
طراحی کنسول جراحی این سامانه به گونه ایست که با قابلیت تنظیم پارامترهای ارگونومیک متعدد، راحتی بیشتری را برای جراح به ارمغان می آورد.
۶
کاهش جراحات وارد شده به بیمار
با استفاده از سامانه رباتیک سینا بدون نیاز به ورود دست جراح به داخل شکم بیمار، با بهره گیری از ابزارهای انعطاف پذیر می توان حرکات دست و انگشتان جراح را در داخل بدن بیمار و با عبور از یک شکاف ۵ میلیمتری به اجرا درآورد.
طراحی آزادانه معماری جراحی

امکان جراحی در حالت های ارگونومیک نشسته، نیمه نشسته و ایستاده
تیلت بیمار در چهار جهت بدون توقف جراحی
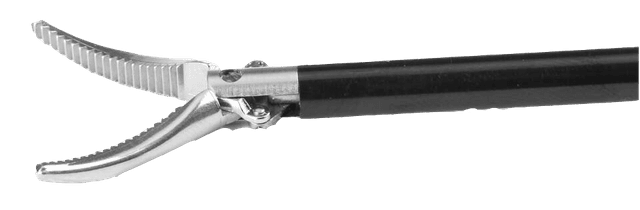
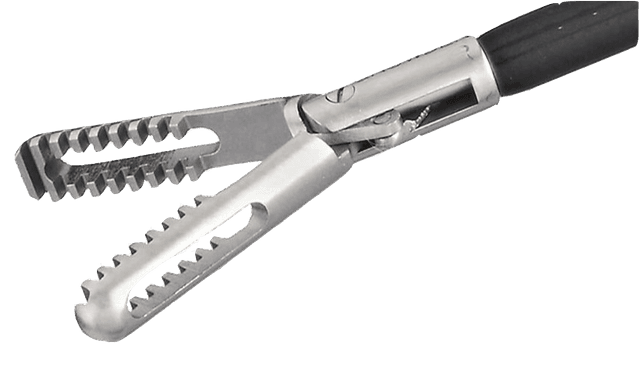
ابزارهای ۵ میلیمتری یکبار مصرف، خمش به کلیه ی جهات و چرخش وضعی بی نهایت

حس نیروهای تعاملی